Note
Go to the end to download the full example code.
3.4.8.15. Example of linear and non-linear models¶
This is an example plot from the tutorial which accompanies an explanation of the support vector machine GUI.
import numpy as np
import matplotlib.pyplot as plt
from sklearn import svm
rng = np.random.default_rng(27446968)
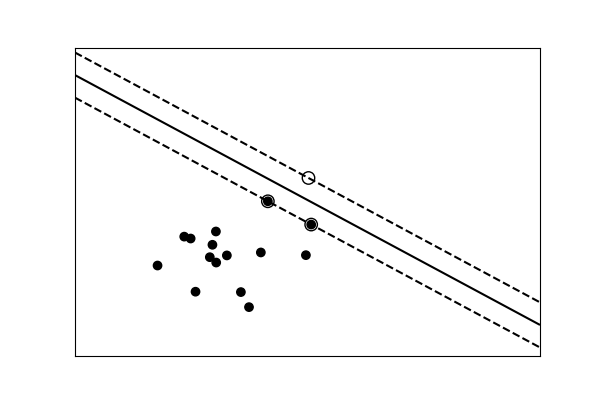
data that is linearly separable
def linear_model(rseed=42, n_samples=30):
"Generate data according to a linear model"
np.random.seed(rseed)
data = np.random.normal(0, 10, (n_samples, 2))
data[: n_samples // 2] -= 15
data[n_samples // 2 :] += 15
labels = np.ones(n_samples)
labels[: n_samples // 2] = -1
return data, labels
X, y = linear_model()
clf = svm.SVC(kernel="linear")
clf.fit(X, y)
plt.figure(figsize=(6, 4))
ax = plt.subplot(111, xticks=[], yticks=[])
ax.scatter(X[:, 0], X[:, 1], c=y, cmap="bone")
ax.scatter(
clf.support_vectors_[:, 0],
clf.support_vectors_[:, 1],
s=80,
edgecolors="k",
facecolors="none",
)
delta = 1
y_min, y_max = -50, 50
x_min, x_max = -50, 50
x = np.arange(x_min, x_max + delta, delta)
y = np.arange(y_min, y_max + delta, delta)
X1, X2 = np.meshgrid(x, y)
Z = clf.decision_function(np.c_[X1.ravel(), X2.ravel()])
Z = Z.reshape(X1.shape)
ax.contour(
X1, X2, Z, [-1.0, 0.0, 1.0], colors="k", linestyles=["dashed", "solid", "dashed"]
)
<matplotlib.contour.QuadContourSet object at 0x7f3b1c1e5fa0>
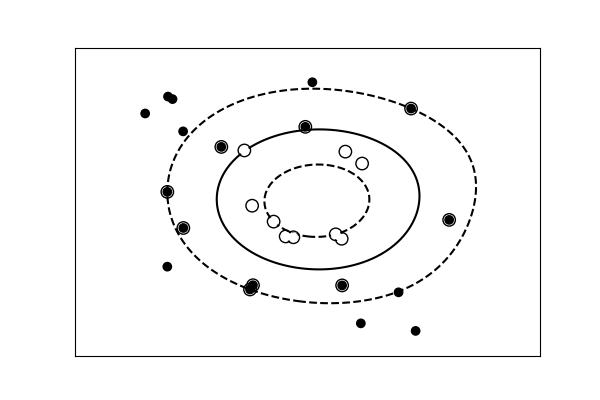
data with a non-linear separation
def nonlinear_model(rseed=27446968, n_samples=30):
rng = np.random.default_rng(rseed)
radius = 40 * rng.random(n_samples)
far_pts = radius > 20
radius[far_pts] *= 1.2
radius[~far_pts] *= 1.1
theta = rng.random(n_samples) * np.pi * 2
data = np.empty((n_samples, 2))
data[:, 0] = radius * np.cos(theta)
data[:, 1] = radius * np.sin(theta)
labels = np.ones(n_samples)
labels[far_pts] = -1
return data, labels
X, y = nonlinear_model()
clf = svm.SVC(kernel="rbf", gamma=0.001, coef0=0, degree=3)
clf.fit(X, y)
plt.figure(figsize=(6, 4))
ax = plt.subplot(1, 1, 1, xticks=[], yticks=[])
ax.scatter(X[:, 0], X[:, 1], c=y, cmap="bone", zorder=2)
ax.scatter(
clf.support_vectors_[:, 0],
clf.support_vectors_[:, 1],
s=80,
edgecolors="k",
facecolors="none",
)
delta = 1
y_min, y_max = -50, 50
x_min, x_max = -50, 50
x = np.arange(x_min, x_max + delta, delta)
y = np.arange(y_min, y_max + delta, delta)
X1, X2 = np.meshgrid(x, y)
Z = clf.decision_function(np.c_[X1.ravel(), X2.ravel()])
Z = Z.reshape(X1.shape)
ax.contour(
X1,
X2,
Z,
[-1.0, 0.0, 1.0],
colors="k",
linestyles=["dashed", "solid", "dashed"],
zorder=1,
)
plt.show()
Total running time of the script: (0 minutes 0.064 seconds)